The chaotically moving objects dense clusters digital twin is being developed by students from NUST MISIS, ITMO and MIPT to navigate robots. It is going to be a web service using graph neural networks, which will allow studying the physics of crowds, the laws of swarm behavior in animals and the principles of “active matter” motion. This data is often required for educating courier robots, drones and other autonomous devices operating in crowded spaces. The first results were published in the Journal of Physics: Conference Series.
If, while moving in the flow of people in the subway, we begin to focus our gaze on someone from the oncoming traffic, we will definitely stop in the middle of the crowd and collide with somebody. When we walk through the crowd relaxed, “intuitively”, then we unmistakably choose the desired trajectory and maneuver in the stream, without touching anyone. And almost every person can do it, because the brain works like a complex neural network. Imperceptibly for consciousness, he uses the intuitive knowledge accumulated over the years, quickly calculates the changing conditions and chooses the optimal path.
Modern engineers need to understand exactly how this neural network works to adopt its principles and integrate them into the digital environment. The task of navigating robots in dense clusters (people, cars, other robots, etc.) becomes more and more urgent every year. At the same time, for successful device management, it is necessary to track and extrapolate the trajectory of each individual agent in such clusters, which is a difficult task.
Such systems can be effectively described statistically as “active matter”, in which each particle itself pumps energy into the system, and successfully simulates such matter using ensembles of chaotically moving robots — for example, imitate the behavior of a flock of birds or a school of fish. To do this, one needs to create a simulation of active matter, i.e. to generate swarm behavior.
To implement such swarm robotics systems, numerous laboratories around the world need large “swarms” of robots moving according to simple laws — as platforms for experimental simulation of crowd physics. However, conducting such experiments requires significant resources and is not available to all scientific groups.
“Implementation of such an experimental platform requires competence in circuitry, and significant financial costs are required to create a sufficient number of structurally homogeneous robots. As an alternative, we propose the creation of an experimental unit digital twin, which allows both to eliminate the costs of its physical implementation and to speed up and automate the process of setting up experiments. The ability to effectively build such software is confirmed by recent applications of graph neural networks to similar tasks, including fluid dynamics simulations, ” said Vadim Porvatov, leader of the student research team, a graduate of the Department of Engineering Cybernetics at NUST MISIS.
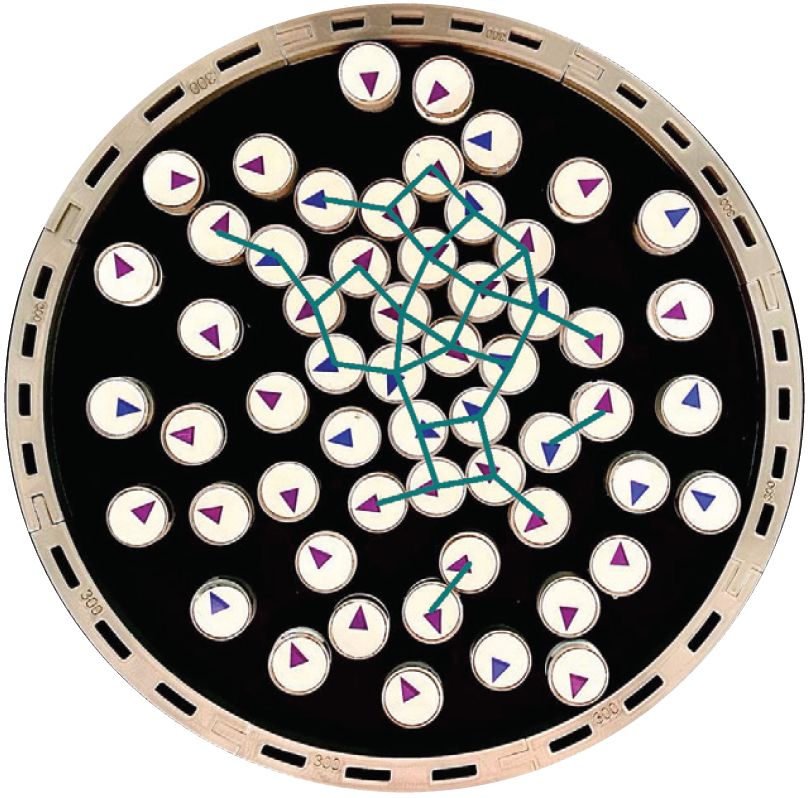
According to the developers, an experimental unit assembled by the project team, consisting of 100 moving robots, is used as a data source for the neural network algorithm. The movement of the system is being recorded with a video camera. The algorithms provided by the OpenCV library will be used as the main tool for tracking individual trajectories. The information about the setup configuration, together with the trajectories obtained as a result of the movement of the robots, will be used to train the graph neural network.
“The developed neural network will allow scientific groups to significantly simplify the process of studying physical processes in dense clusters of chaotically moving particles and can be supplied as a product. Measuring all coordinates and velocities of robots will allow obtaining an exhaustive description of the processes occurring in the system, including information on phase transitions and clustering of robots,” explained Nikita Olekhno, co-author of the study, a Ph.D. student at ITMO Faculty of Physics.
The use of the digital twin will enable industry research related to navigation in chaotic environments. For example, virtual simulations are already being used by NVidia to develop navigation algorithms for unmanned vehicles. The results of the work can be used to train control algorithms for ground drones moving in dense traffic. Simulations like these can be especially useful for testing courier robots.
“At the moment, a rather complex experimental unit has been assembled, and we will continue to use it to create a digital twin,” emphasized Nikita Olekhno.

